

摘要:本文主要研究了切割机器人的编程方式及其应用领域。通过深入分析不同编程语言的特性和优势,结合切割机器人的工作特点,提出了一种高效的编程方法。该方法不仅提高了切割机器人的工作精度和效率,还拓宽了其在工业制造、医疗、航空航天等领域的应用范围。本文的研究为切割机器人的进一步发展和推广提供了重要的理论和实践依据。
本文目录导读:
随着工业自动化水平的不断提高,切割机器人作为智能制造领域的重要组成部分,其应用越来越广泛,切割机器人能够高效、精准地完成各种材料的切割作业,提高生产效率和产品质量,而编程方式则是切割机器人实现高精度、高效率作业的关键,本文将详细介绍切割机器人的编程方式及其在实际应用中的优势与挑战。
切割机器人编程方式概述
切割机器人的编程方式主要包括示教编程、图形编程和基于传感器的自主编程等,示教编程是通过操作人员现场操作机器人进行切割作业,并将这个过程记录下来形成程序,图形编程则是通过计算机图形学技术,将CAD图形数据转换为机器人运动轨迹,基于传感器的自主编程则是利用传感器技术,使机器人在作业过程中自动识别物料、定位并进行切割。
切割机器人编程方式详解
1、示教编程
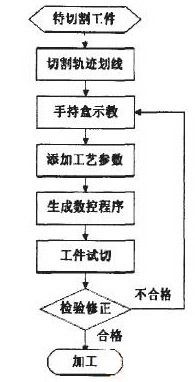
示教编程是一种简单直观的编程方式,适用于对精度要求不高的场合,操作人员在现场操作机器人进行切割作业,同时将机器人的运动轨迹、工艺参数等信息记录下来,形成程序,示教编程的优点是操作简单,易于实现,由于操作人员的经验和技术水平不同,示教编程的精度和稳定性难以保证,对于复杂的切割任务,示教编程难以实现高效、精准的完成。
2、图形编程
图形编程是一种基于计算机图形学技术的编程方式,它通过CAD图形数据转换,将设计好的图形转换为机器人运动轨迹,图形编程的优点是精度高、效率高,适用于复杂的切割任务,通过CAD图形的修改,可以方便地调整机器人的运动轨迹,实现灵活多变的切割作业,图形编程需要专业的技术人员操作,对于非专业人士来说有一定的门槛。
3、基于传感器的自主编程
基于传感器的自主编程是一种利用传感器技术实现的自动化编程方式,它通过传感器识别物料、定位并进行切割,无需人工干预,基于传感器的自主编程的优点是精度高、效率高,且能够适应不同种类的物料和复杂的作业环境,由于减少了人工干预,可以降低生产成本和人工误差,基于传感器的自主编程需要高精度的传感器和复杂的算法支持,技术实现难度较大。
切割机器人编程方式的应用优势与挑战
1、应用优势
(1)提高生产效率和产品质量:切割机器人通过精确的编程方式,可以高效、精准地完成各种材料的切割作业,提高生产效率和产品质量。

(2)降低人工成本:切割机器人的自动化程度高,可以替代人工完成危险、繁重的工作,降低人工成本。
(3)适应复杂作业环境:切割机器人可以通过不同的编程方式,适应不同的作业环境和物料,具有广泛的应用前景。
2、挑战
(1)技术难度:切割机器人的编程方式需要专业的技术人员操作,对于非专业人士来说有一定的门槛,基于传感器的自主编程等技术实现难度较大。
(2)成本投入:切割机器人的购置和维护成本较高,需要企业投入大量的资金。

(3)安全与稳定性:在实际应用中,切割机器人的安全与稳定性是关注的重点,需要加强对机器人的监控和管理,确保作业过程中的安全与稳定。
切割机器人的编程方式是实现高精度、高效率作业的关键,示教编程、图形编程和基于传感器的自主编程等不同的编程方式各有优缺点,适用于不同的应用场景,在实际应用中,需要根据具体的生产需求和环境条件选择合适的编程方式,还需要克服技术难度、成本投入以及安全与稳定性等挑战,推动切割机器人在智能制造领域的更广泛应用。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...